New Open Source Tool for Plant Pest and Pathogen Spread Modeling
Vaclav (Vashek) Petras, Chris Jones, Anna Petrasova, Devon Gaydos, Kellyn P. Montgomery & Ross K. Meentemeyer
NCSU GeoForAll Lab
and
Landscape Dynamics Group
at the
Center for Geospatial Analytics,
North Carolina State University
NCGIS 2019 Winston-Salem
Feb 27 - Mar 1, 2019
Motivation
- Plant diseases and pests threaten production of food and plant-based materials.
- NCSU CGA & USDA APHIS investigating the spread of pests and pathogens.

This work was made possible, in part, by a Cooperative Agreement from the United States Department of Agriculture’s Animal and Plant Health Inspection Service (APHIS). It may not necessarily express the views of APHIS.
Research
- Sampling and other field work
- Modeling
- Software for modeling of the spread
- Using the model for management
- Open source
- Open science

PoPS Model
Pest or Pathogen Spread Model
- Spread of pests and pathogens over a landscape (spatially explicit)
- Open source
- Various ways of using it
- Already in use
- Actively developed
Mechanics
Generating dispersers (spores or insect)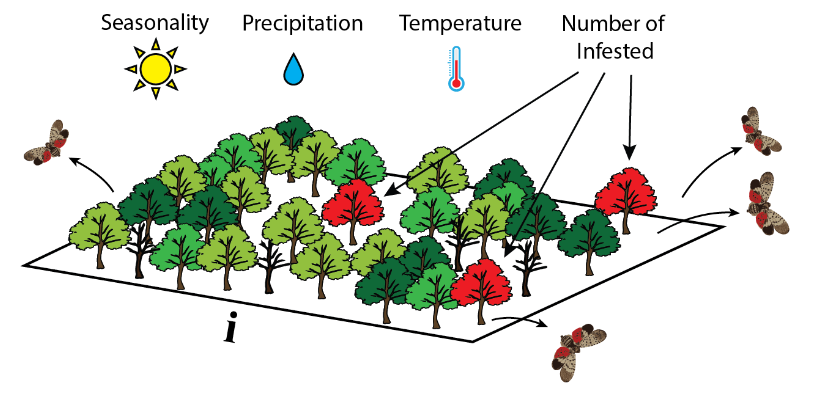
Mechanics
Spreading the dispersers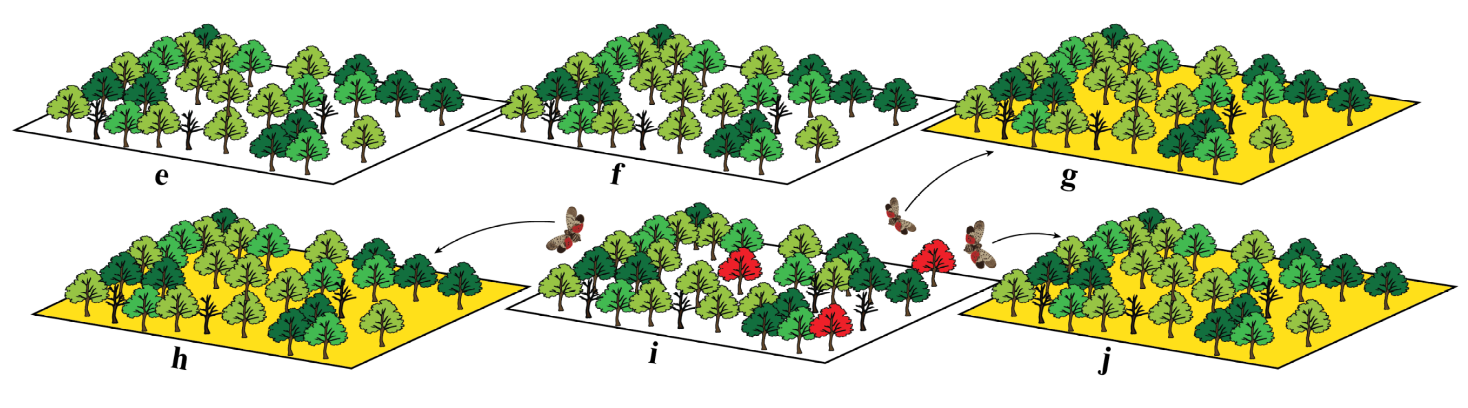
Mechanics
Establishment of the dispersers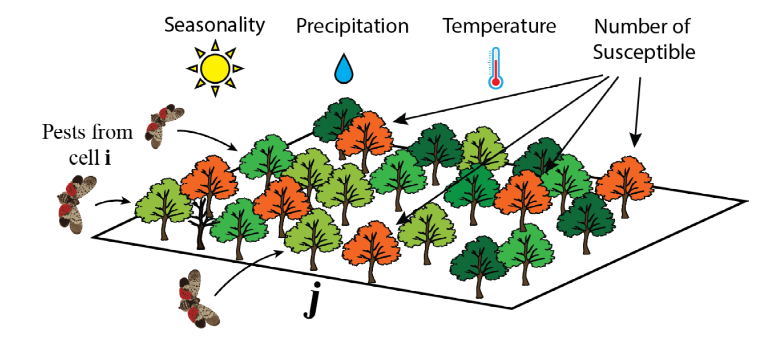
Scenarios and Model Result
Spatial distribution of infected or infested hosts and spatial management input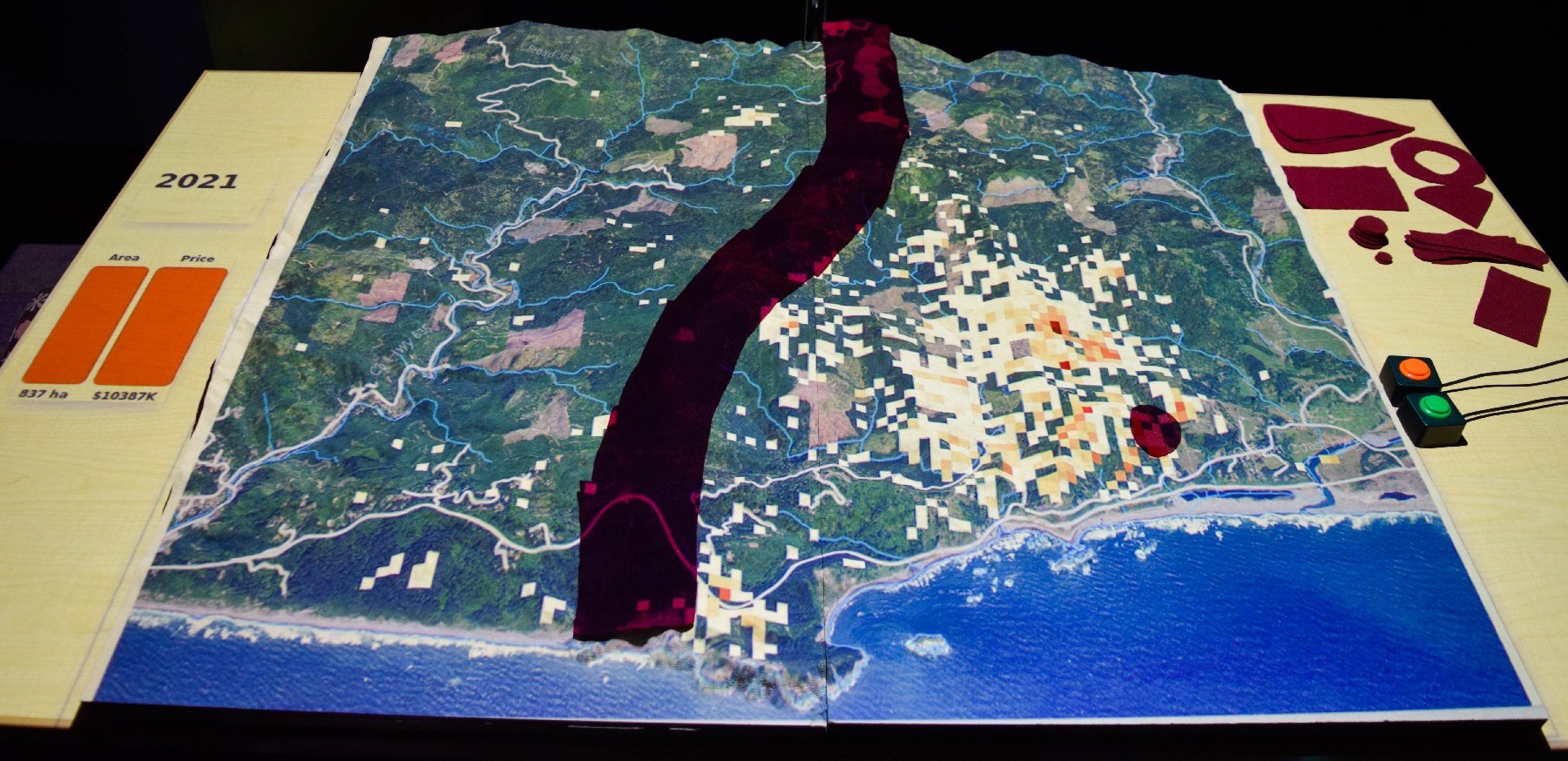
Parts and Interfaces
- C++ Library
- R Package
- GRASS GIS Module
- Tangible Landscape Application
C++ Library
- Using C++ for performance reasons
- R was too slow
- R with Rcpp implementation was too slow
- Rcpp: Seamless R and C++ Integration
- Using C++11
C++
- What-if descriptions of languages:
- Python: What if everything was a dictionary?
- R: What if everything was of a different type?
- C++: What if we added everything to one language?
- C++11: What if we didn't know when to stop?
- C++11 aims at being more convenient and friendlier to beginners
// creating simulation object
Raster<int> infected = {{5, 0},
{0, 0}};
int ew_res = 30;
int ns_res = 30;
Simulation<Raster<int>, Raster<double>>
simulation(42, infected, ew_res, ns_res);
R Package
- Rcpp for accessing the C++ library from R
- statistical functions
- functions to implement calibration
- preprocessing, postprocessing, visualization functions
R Package: Usage
host_file <- system.file(..., "host.tif", ...)
# ...
data <- pops(
infected_file, host_file, ...
reproductive_rate = 1.0,
...
start_time = 2001, end_time = 2005)
Install:
install.packages("devtools")
library(devtools)
devtools::install_github("ncsu-landscape-dynamics/rpops")
library(PoPS)
GRASS GIS Module
- GRASS GIS interface to the C++ library written in C++
- various user interface in GRASS GIS
- tools for spatial analysis
- preprocessing, postprocessing, visualization tools
- published in GRASS GIS Addons repository
g.extension r.pops.spread
GRASS GIS Module: GUI
Graphical user interface for PoPS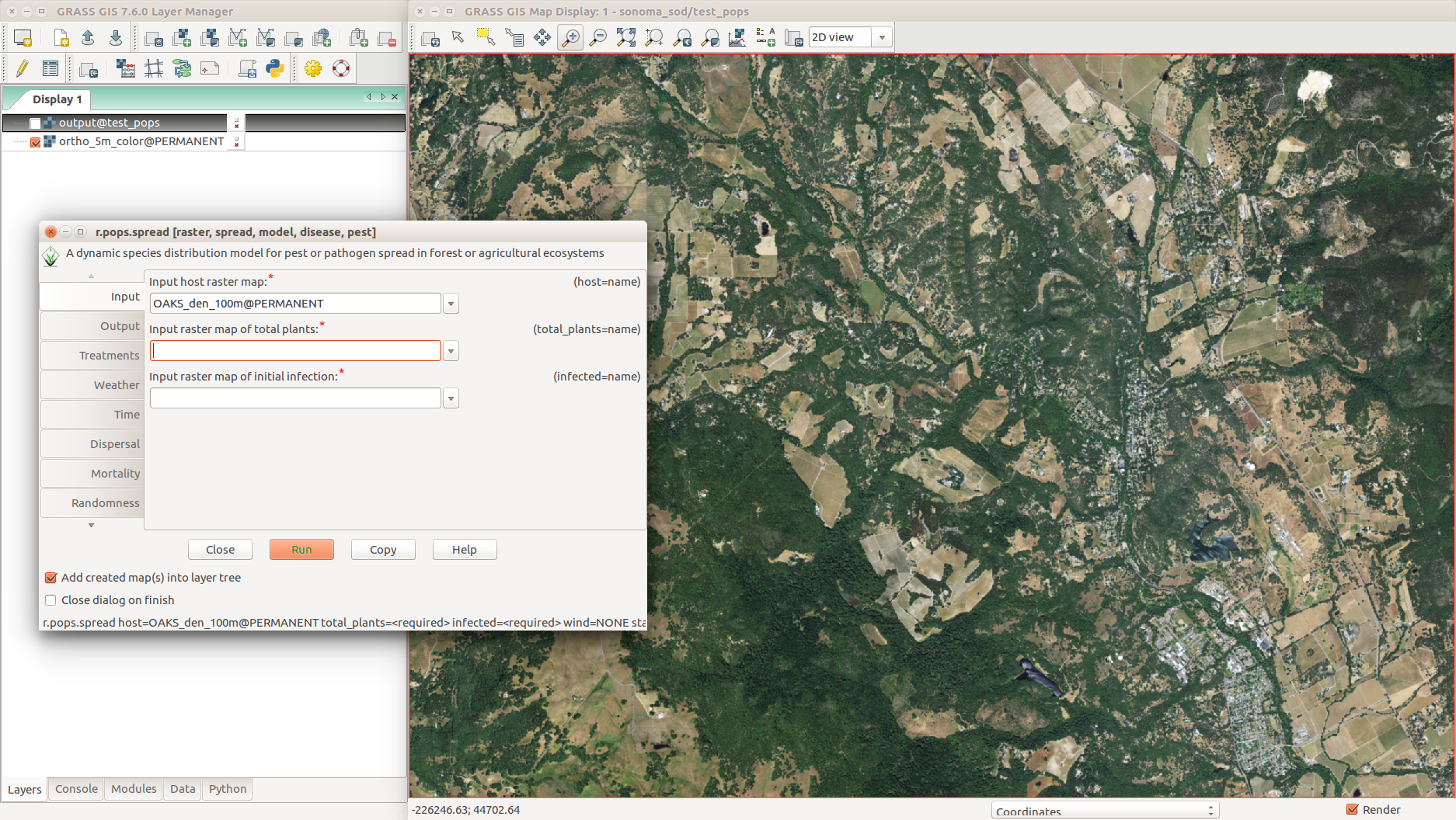
GRASS GIS Module: Python
Python interface for PoPS in GRASS GISimport grass.script as gs
gs.run_command('r.import', input='host.tif', ...)
# ...
gs.run_command('r.spread.sod', species='host', ...
moisture_file='moistures.txt',
temperature_file='temperatures.txt',
start_time=2005, end_time=2010,
rtype='cauchy', wind='NE', random_seed=42)
GRASS GIS Module: Command line
Command line (Bash) interface for PoPS in GRASS GISr.import input=host.tif ...
# ...
r.spread.sod species=lide lvtree=all infected=infected_2005 \
moist_file=moistures.txt \
temp_file=temperatures.txt \
output=spread_sod start_time=2005 end_time=2010 \
rtype=cauchy wind=NE rseed=4
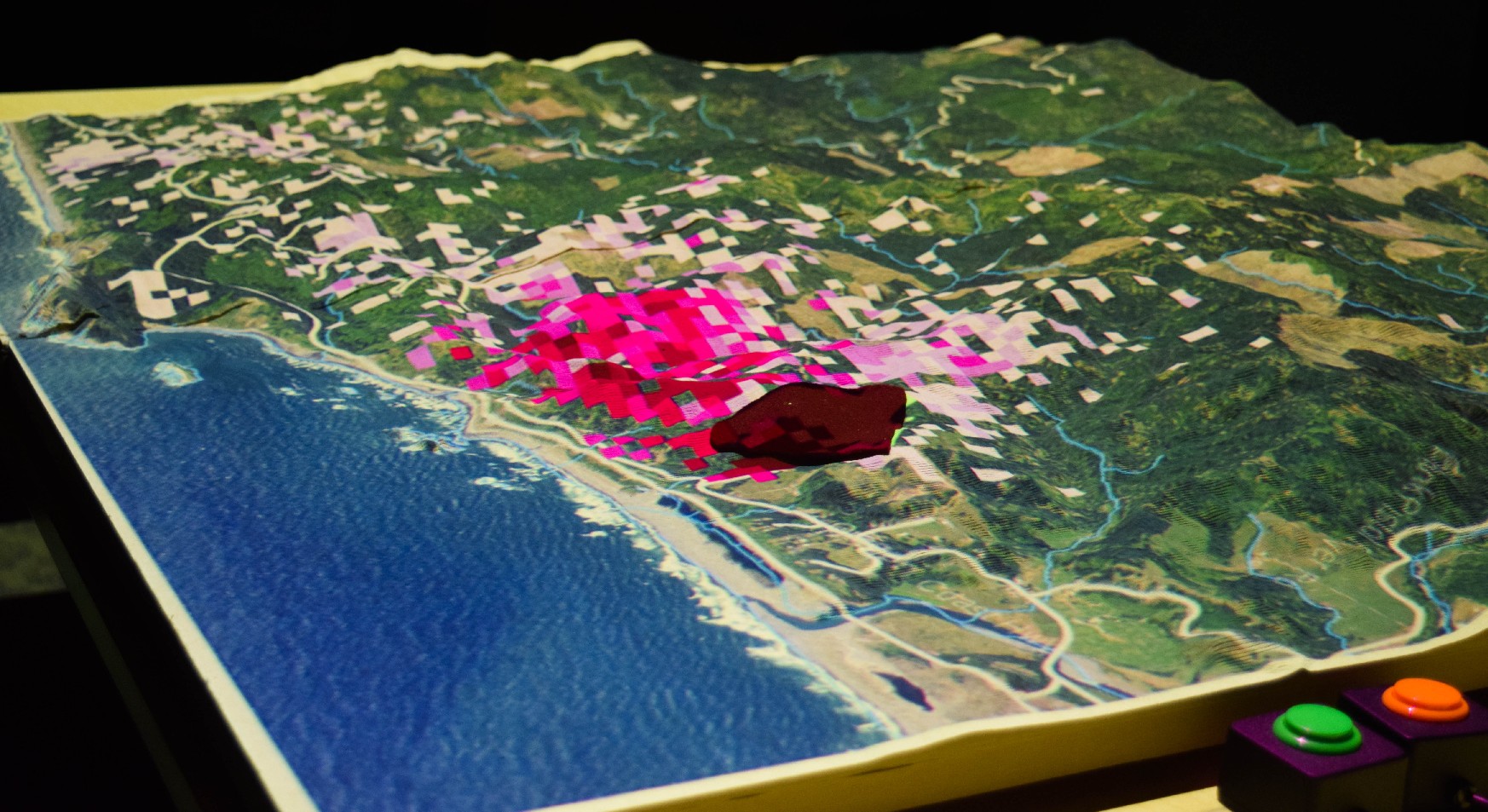
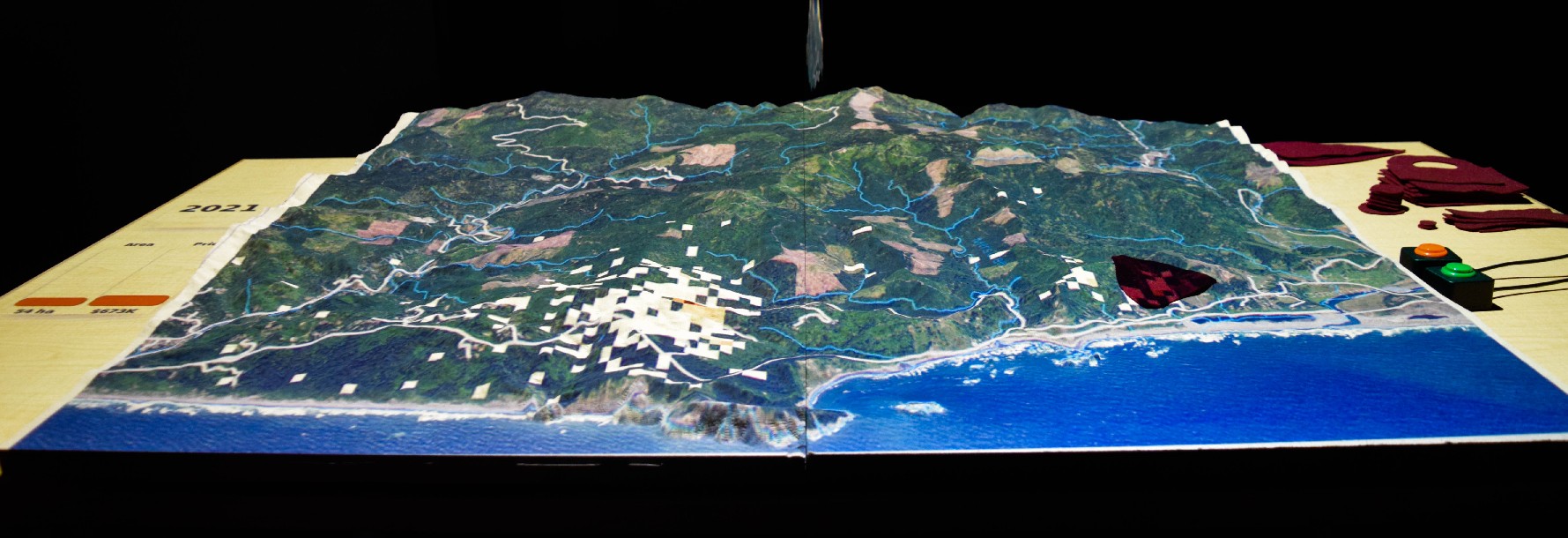
Tangible Landscape Application
Low-barrier interface to the model
Sudden Oak Death Management Workshop, Oregon, 2017
Open Science
- open source
- availability
- model is open source (C++ core)
- dependencies are open source (R or GRASS GIS)
- integrations are open source (R and GRASS GIS interfaces)
- GNU GPL >=2
Image credit: Open Science Logo v2, CC BY-SA 3.0 Greg Emmerich
Open Science
- opportunities
- available early (since the experimental phase, i.e. pre-release)
- more applications of the model in research and management
- open collaboration on improving the model
- easier collaboration within our institution
Image credit: Open Science Logo v2, CC BY-SA 3.0 Greg Emmerich
Open Science
- review
- the model can be scrutinized (more than the traditional peer-review)
- review can be performed by anybody (not just by scientists)
Image credit: Open Science Logo v2, CC BY-SA 3.0 Greg Emmerich
Coming Soon
- Release 1.0.0
- DOI
- Tools for calibration and validation
Slides: ncsu-landscape-dynamics.github.io/pops-talk
Official collaboration: geospatial.ncsu.edu/engage
Twitter: vaclavpetras
GitHub: wenzeslaus
GitLab: vpetras
Come to see the NCSU Center for Geospatial Analytics booth!
